Five different ways to test Gemini on small-parts reasoning
Now updated with real runs for the first two recommended experiments: coordinate calibration and crop-based zoom search on the actual drone frame.
- Method 1 worked cleanly. Both gemini-2.5-pro and gemini-robotics-er-1.5-preview returned the exact synthetic landmark coordinates: 0 px mean error.
- Method 3 also worked. Tiled crop-search surfaced many more candidate fasteners than one-shot prompting on the real image.
- But: more points does not automatically mean more truth. Crop-search increased recall / exploration, but almost certainly also introduced false positives.
| Model | Calibration board | One-shot fastener search | Tiled crop-search | Takeaway |
|---|---|---|---|---|
| gemini-2.5-pro | 5/5 landmarks exact 0 px mean error |
12 candidate fasteners mostly symmetric central structure |
27 merged candidates many more peripheral / local-detail hits |
Good raw grounding + crop search expands coverage, but likely overcalls. |
| gemini-robotics-er-1.5-preview | 5/5 landmarks exact 0 px mean error |
8 candidate fasteners coarser / more selective than 2.5 Pro |
27 merged candidates similar expansion under crop-search |
Also understands pixel frame correctly on calibration; crop-based prompting materially changes behavior. |
Important caveat: these counts are not ground-truth precision/recall numbers yet. They are behavior probes.

- One-shot prompt found 12 likely fasteners.
- Tiled crop-search found 27 merged candidates.
- The extra candidates cluster on smaller peripheral hardware and partially obscured regions.
- Interpretation: the crop strategy is doing real work. It changes the search behavior, not just the formatting.

- One-shot prompt found 8 likely fasteners.
- Tiled crop-search found 27 merged candidates.
- So the zoom-search effect is not just a 2.5 Pro quirk; it also changes the robotics model materially.
- Interpretation: if we let Gemini act like an inspection agent, small-parts grounding becomes much more aggressive.
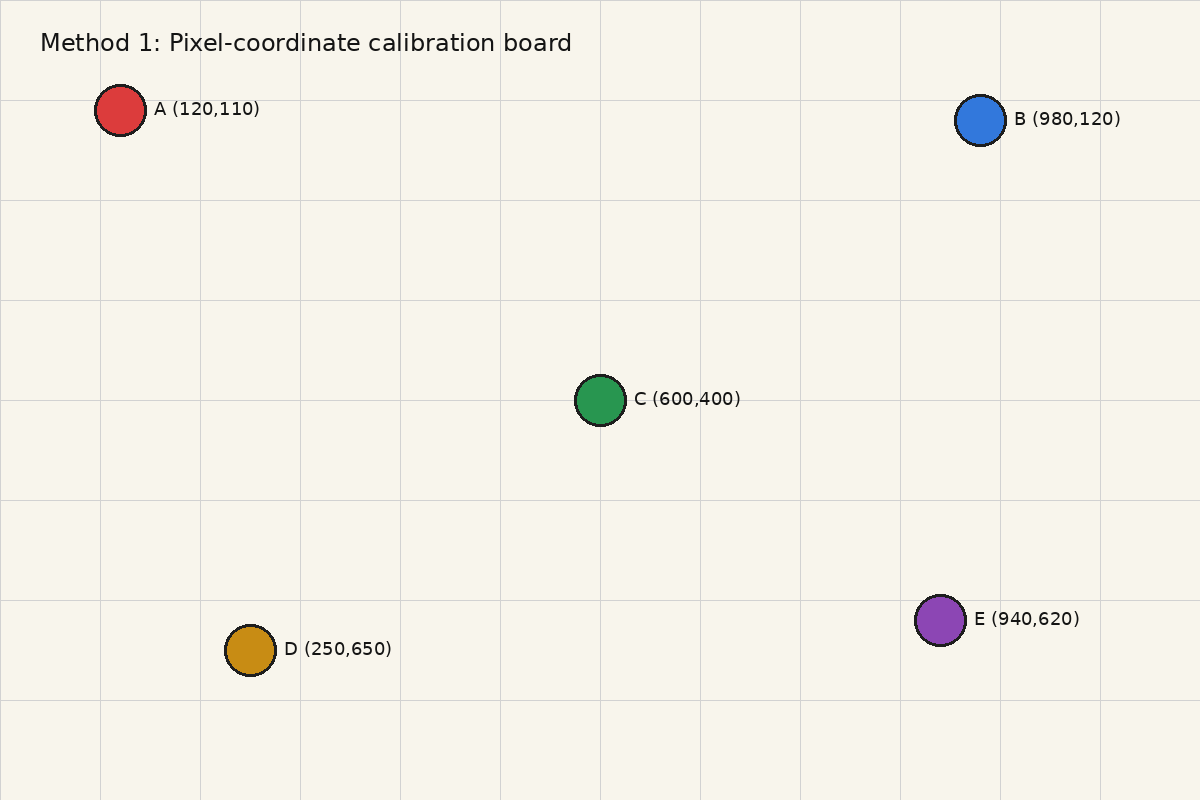
Both models returned the exact centers for all five labeled circles on the synthetic calibration image.
- gemini-2.5-pro: 0 px mean error
- gemini-robotics-er-1.5-preview: 0 px mean error
This is good news: the weirdness we saw earlier is probably not a generic “Gemini does not know image coordinates” problem. It is more likely prompt/task-specific or scene-specific.
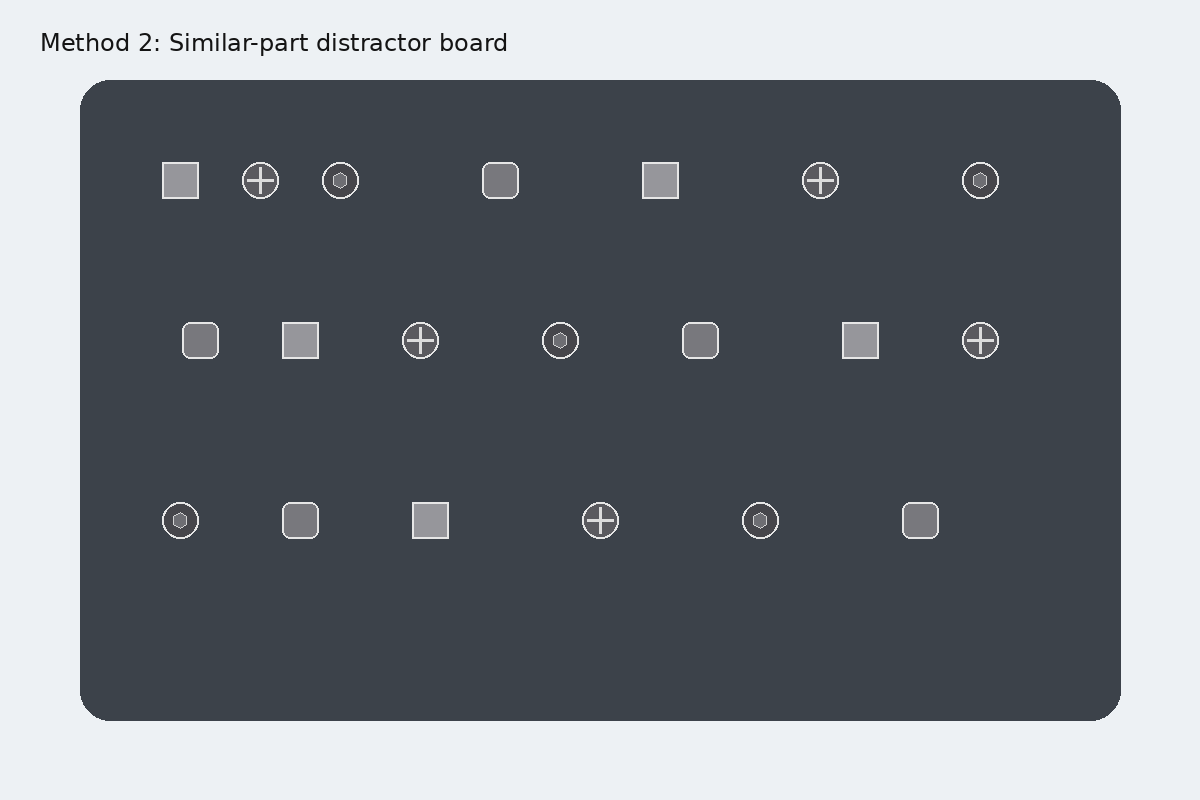
Still worth running next. This would separate “bad localization” from “category confusion among tiny metal parts.”
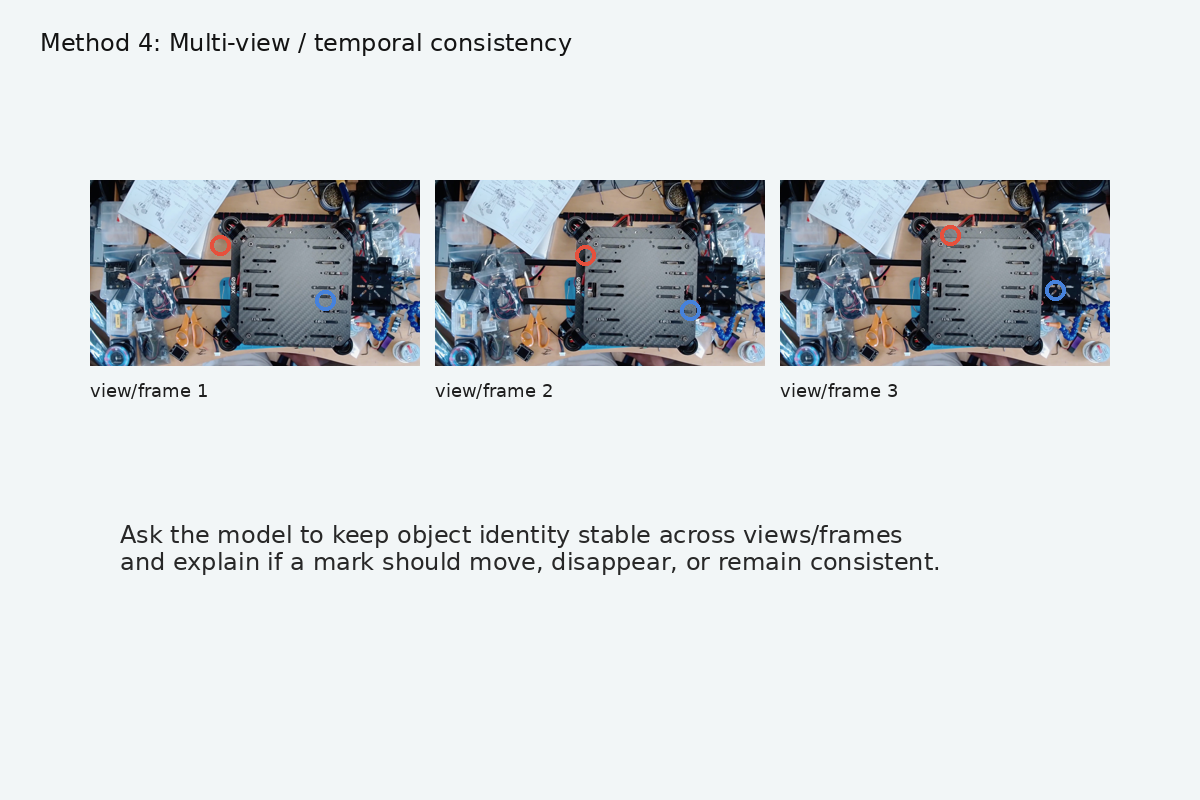
Still pending. Important if the end goal is stable part identity across multiple views rather than single-image marking.
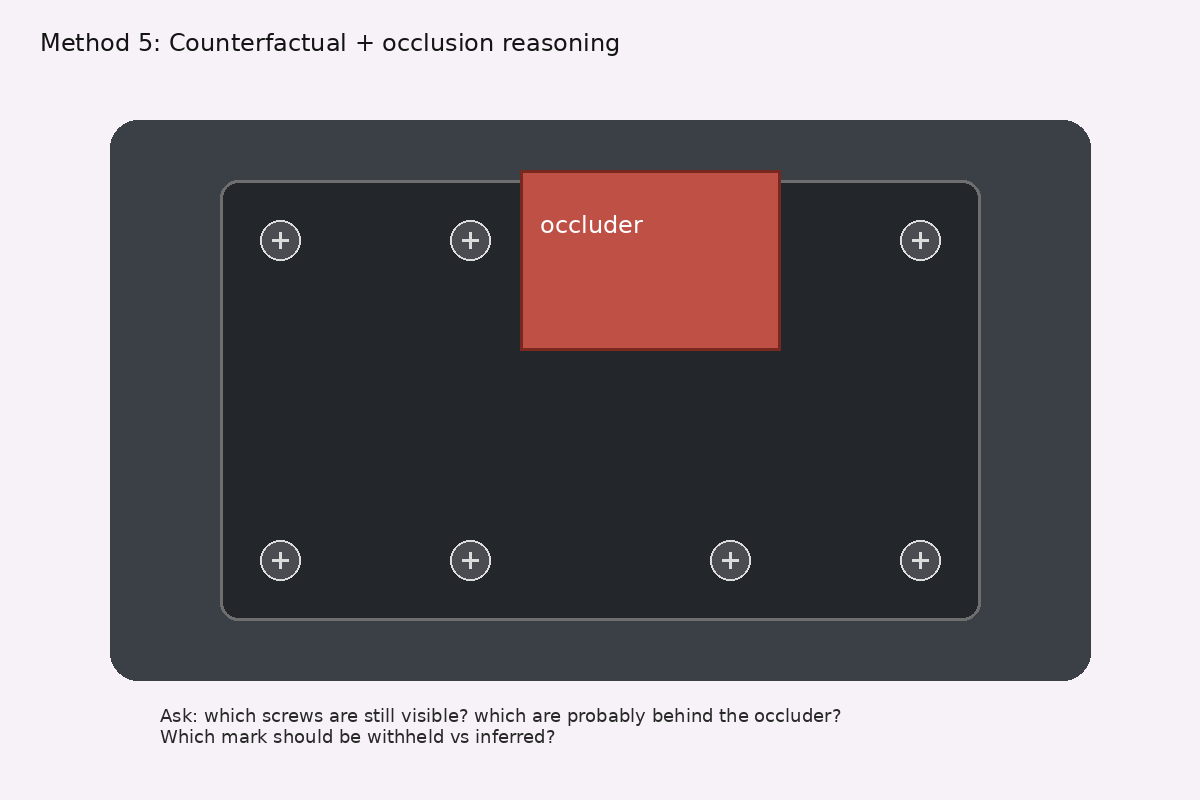
Still pending. Useful for distinguishing “I see it” from “I infer it’s behind the occluder.”
What worked
- Pixel coordinates can be exact on a clean synthetic target.
- Crop-based prompting clearly changes model behavior on tiny hardware.
What remains unresolved
- We still do not have human-labeled ground truth for the real drone image.
- So the crop-search result should be read as “higher exploratory recall” rather than “higher measured accuracy.”
- The next rigorous step is a small hand-labeled benchmark on 3–10 real images.